Biography
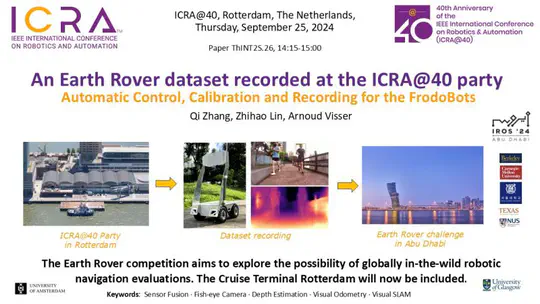
Zhang Qi is a third-year PhD student in the computer vision group at UvA, researching the Nerual visual SLAM under the joint supervision of Dr. Martin R. Oswald, Dr. Sezer Karaoglu, and Prof. Theo Gevers. Occasionally, I do interesting things with Prof. Arnoud about data collection and algorithms for smart snack vending carts.
During the master’s studies at the University of Glasgow, he is working on the Camera-Assisted Algorithm for Autonomous Exploration Aiding the Visually Impaired under the supervision of Dr. Jianglin Lan in Glasgow.
Outside his research work, he is an outstanding beatbox performer and an amateur long-distance runner (10km/40min).
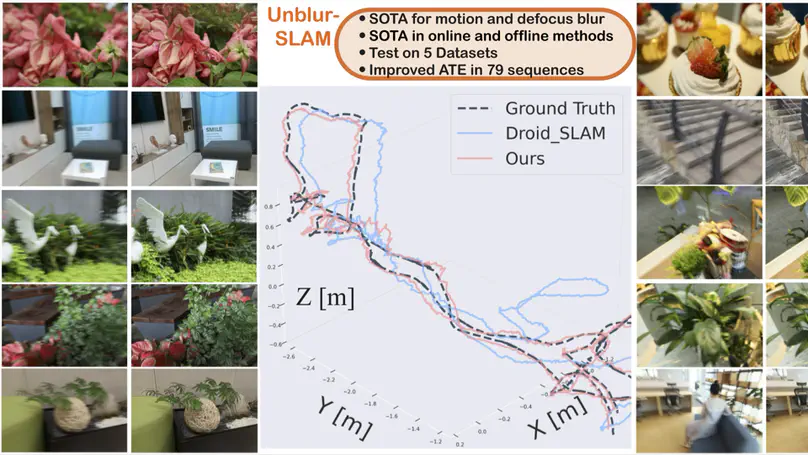
- Visual SLAM
- Neural Network
MSc in Data Science, 2022
University Of Glasgow
News
Selected Publications
Recent Publications
Projects & Code
Contact
I welcome exchanges and collaborations with fellow scholars. Undergraduate students are also welcome to work together on projects. Please feel free to contact me.
- q.zhang2@uva.nl
- 8:00 to 18:00